| 产品特性:机械手 | 是否进口:否 | 产地:德国 |
| 工作范围:工业 | 品牌:雄克 | 型号:GSM-P 32-IS-S-180 |
| 关节数量:2 |
GSM-P 32-AS-S-090
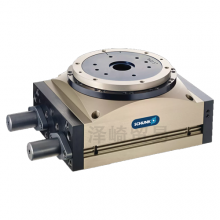
旋转抓取模块,带平动机械手
ID 304731
旋转抓取模块,带平动机械手 GSM-P, 尺寸: 32, 气动, 抓取力保持装置: AS, 终端终点位置阻尼: 液压减震器
单指行程: 4 mm
旋转角度: 90 °
闭合力: 51 N
端位置调整: 90 °
扭矩: 0.35 Nm
GSM-P 32-IS-E-090
旋转抓取模块,带平动机械手
ID 304632
旋转抓取模块,带平动机械手 GSM-P, 尺寸: 32, 气动, 抓取力保持装置: IS, 终端终点位置阻尼: 弹性体
单指行程: 4 mm
旋转角度: 90 °
张开力: 48 N
端位置调整: 90 °
扭矩: 0.35 Nm
GSM-P 32-IS-S-180
旋转抓取模块,带平动机械手
ID 303932
旋转抓取模块,带平动机械手 GSM-P, 尺寸: 32, 气动, 抓取力保持装置: IS, 终端终点位置阻尼: 液压减震器
单指行程: 4 mm
旋转角度: 180 °
张开力: 48 N
端位置调整: 180 °
扭矩: 0.35 Nm
产品系列的常规说明
抓取力
在距离 P(请参见插图)处施加到每个机械手夹爪的抓取力的算术和。
手指长度
沿主轴方向,从距基准面距离 P 处测得。
工件重量
采用摩擦系数 0.1 和安全系数(防止由于重力加速 g 工件滑落) 2 计算压入配合抓取。如果是适形或捕获式抓取,可抓取工件重量则大很多。
重复精度
定义为 100 个连续行程后极限位置分布。
闭合、张开和旋转时间
开合时间仅指基爪的移动时间,不含特定应用的机械手手指。旋转时间是旋转部件的纯运动时间。 不包括阀门开关时间、软管注入时间或 PLC 反应时间,但是计算周期时必须考虑这些时间。
中间连接负载
用以表示典型荷载。定义在转动惯量为值的一半时可旋转,不会受限、没有弹跳或撞击,负载在中心位置,旋转轴沿竖直方向。